
1
IAHR
CIC
XXV CONGRESO LATINOAMERICANO DE HIDRÁULICA
SAN JOSÉ, COSTA RICA, 9 AL 12 DE SEPTIEMBRE DE 2012
LOCALIZACIÓN DE PUNTOS DE MONITOREO DE CALIDAD DE AGUA
EN SISTEMAS DE DISTRIBUCIÓN
Sara C. Gacharná, María X. Hernandez, César A. Prieto, César M. Jurado y Juan G.
Saldarriaga
Centro de Investigaciones en Acueductos y Alcantarillados (CIACUA), Departamento de Ingeniería Civil y Ambiental,
Universidad de los Andes, Bogotá, Colombia
sc.gacharna41@uniandes.edu.co, mx.hernandez41@uniandes.edu.co, ce-priet@uniandes.edu.co, c-
jurado@uniandes.edu.co, jsaldarr@uniandes.edu.co
RESUMEN
Durante años las empresas prestadoras del servicio de agua potable han utilizado procedimientos
empíricos para localizar los puntos en los cuales deben hacerse muestreos periódicos de calidad del
agua. Aunque se cuenta con varios métodos, los coeficientes de decaimiento del cloro, tanto de
cuerpo como de pared, no son conocidos. A pesar de esta limitación, se han desarrollado
metodologías con el objetivo de diseñar redes de sensores que garanticen un constante monitoreo
de la calidad, pero estas implican una alta incertidumbre. En la investigación objeto de este artículo
se buscó desarrollar una metodología que permitiera en ese ambiente de pocos datos, escoger los
puntos de monitoreo de calidad de agua que respondieran simultáneamente a dos problemas típicos
de las redes de distribución. Se hizo uso de un software desarrollado para este estudio, y del
programa TEVA-SPOT. La nueva metodología fue aplicada exitosamente en los 37 sectores
hidráulicos en los que se encuentra dividida la red de agua potable de la ciudad de Bogotá,
Colombia. Finalmente, aunque el estudio se realizó para estos sectores, se tomó como ejemplo uno
de estos sectores como red tipo. Los resultados evidencian que ambas metodologías son confiables
y que el diseño de la red de sensores depende del objetivo que se busque optimizar.
PALABRAS CLAVES: Calidad de agua, redes de distribución de agua potable, monitoreo.

2
INTRODUCCIÓN
Antecedentes
En un sistema de distribución de agua potable, la toma periódica de muestras es la forma tradicional
de realizar un control sobre la calidad de agua entregada a los usuarios. Históricamente esta labor se
ha realizado mediante la elaboración de ensayos estandarizados aplicados a muestras tomadas en
distintos puntos de la red, tales como hidrantes, purgas, salidas domiciliares o estructuras especiales
diseñadas exclusivamente para tal fin. El propósito de localizar dichos puntos varía desde cumplir
con las normas locales de calidad, monitorear eventos de contaminación accidental, hasta incluso
detectar aquellos eventos de contaminación que puedan ser generados de manera intencional. Para
cumplir con el objetivo de garantizar una concentración de cloro residual por encima de lo mínimo
permitido por las normas, se han utilizado metodologías para determinar los coeficientes de
decaimiento de cuerpo (K
b
) y de pared (K
w
).
Por otro lado y con el propósito de monitorear eventos de contaminación accidental o
intencional se han propuesto diferentes modelos de localización de PMC según el objetivo que se
desee alcanzar. Estos objetivos se encuentran descritos en The Battle of Water Sensor Networks
(BWSN; Ostfeld & Salomons, 2006), y están resumidos por Ostfeld et al. (2008).
El asunto puede ser visto como un problema multiobjetivo (Xu et al., 2009), por lo tanto,
resolver un modelo matemático para la localización óptima de sensores de alarma temprana
entendida como un problema de optimización mutiobjetivo, es en sí mismo un problema NP hard
(Xu et al., 2008; Leskovec et al., 2006). Ante esta problemática, diferentes autores han propuesto
aproximaciones tales como la teoría de grafos (Xu et al., 2008); modelos de optimización
determinística (Leskovec et al., 2006); modelos de optimización estocástica y modelos de
optimización robustos (Xuet al., 2008). De la misma manera, en los últimos años se han realizado
nuevos estudios acerca de este tema que tienen una gran influencia sobre la localización de PMC, y
el problema que generan los eventos de contaminación sobre la RDAP (Aral et al., 2010; Shen &
McBean, 2011; Koch & McKenna, 2011).
El objetivo de este estudio se centra en proponer las metodologías apropiadas para la
localización de puntos de monitoreo de calidad (PMC) en RDAP, contando con la existencia de
modelos hidráulicos calibrados y sin datos confiables de los coeficientes K
b
y K
w
, para el caso de
calidad mínima garantizada y de localización de los posibles puntos de desprendimiento de
biopelículas o de contaminaciones intencionales en el caso de eventos de coloración causados por
cambios operacionales o de posibles ataques químicos o biológicos contra esa infraestructura.
Enfoque propuesto
En este estudio se plantean dos metodologías para la localización de PMC. La primera
aproximación al problema es garantizar la concentración mínima de cloro residual en cada uno de
los puntos de la red. La segunda aproximación contempla la posibilidad de un evento de
contaminación mal intencionado o accidental dentro del sistema. Las soluciones deben tener en
cuenta que la calidad del agua disminuye a medida que aumentan tanto la edad media como la
distancia desde la fuente a un punto de consumo. Por otro lado, con respecto a la contaminación
externa, existe cierta incertidumbre en cuanto a dónde, cuándo, y qué tan largos son los eventos de
contaminación (Xu et al., 2009), lo cual es vital para entender el grado de afectación de usuarios y
la localización de PMC de alerta temprana.
Es importante recalcar que tanto la ubicación de PMC que garanticen la calidad mínima,
como la ubicación de PMC que protejan al sistema contra contaminantes, deben ser entendidas de
manera dinámica. En el caso de eventos de coloración o ataques terroristas, al variar la hidráulica
operativa, cambia la afectación de usuarios tanto en cantidad como en localización. Por esta razón,
una metodología de localización de PMC debe dejar clara la posibilidad de tener conjuntos
diferentes de puntos para cada una de las condiciones de operación, o localizar puntos que sirvan
para cualquiera de esas condiciones. De esta manera, los resultados reportados aquí, deben ser
3
analizados bajo un periodo de tiempo y unas condiciones dadas y no considerados como la única
configuración óptima en el diseño de la red de PMC.
TEORÍA DE LA CALIDAD DEL AGUA
El modelo de simulación de calidad de agua, que debe estar acoplado a un modelo hidráulico de la
red, se basa en la suposición de una mezcla completa del soluto. Este tipo de modelo fue
desarrollado por Clark (1990), Rossman, Clark y Grayman (1994) y, estudiado por Rossman (2000)
y otros investigadores en la década de los 90’s. El modelo articula el principio de conservación de la
masa y la cinética de las reacciones del compuesto:
[1]
donde:
=
Concentración
en la tubería i, la cual es función de la distancia x y del
tiempo t.
=
Velocidad del flujo
en la tubería i.
=
Velocidad de reacción
como una función de la concentración.
El modelo tradicional también considera la mezcla en los nudos como completa e instantánea:
[2]
donde:
= Concentración de salida del nodo
.
= Cantidad de tuberías o flujos de entrada.
=
Caudal de entrada de la tubería j.
.
= Concentración de entrada de la tubería j.
.
Para estudiar la cinética de reacción del cloro se debe tener en cuenta el coeficiente de decaimiento
en la masa de agua (
) y el coeficiente de reacción en la pared de la tubería (
). La variación de
la concentración se modela por medio de una cinética exponencial de orden n:
[3]
donde:
=
Velocidad de reacción.
= Coeficiente de reacción
.
=
Concentración de Cloro a la entrada de la tubería
.
=
Orden de la reacción.
Para el caso del cloro la reacción es de primer orden.
El coeficiente de reacción (K) tiene en cuenta los coeficientes (K
b
) y (K
w
):
[6]
donde:
Coeficiente de reacción de cuerpo
.
Coeficiente de reacción de pared
.

4
Coeficiente de transferencia de masa desde el interior del fluido hacia las paredes
. Definida por
.
Radio hidráulico de la tubería
.
LOCALIZACIÓN DE PMC QUE GARANTICEN LA CALIDAD MÍNIMA
La concentración de cloro residual en una RDAP decae una vez que el agua sale de la planta de
potabilización. En los sitios alejados de la planta, el cloro residual puede estar ausente aumentando
los niveles bacterianos. Para mantener la calidad del agua es necesario garantizar cierta
concentración del cloro residual en toda la RDAP (Tzatchkov, 1996). Las empresas prestadoras del
servicio (EPS) normalmente determinan la dosificación del desinfectante por medio de ensayo y
error, aplicando cierta dosis y revisando la concentración en varios puntos de la red. Resulta
imposible económica y técnicamente monitorear el desinfectante en todos los puntos que componen
la RDAP, con lo que existe la incertidumbre de que ciertas partes de ésta queden desprotegidas
(Tzatchkov & Yamanaka, 2004). En el estudio realizado por Tzatchkov (1996), se presenta el
desarrollo de un modelo de simulación dinámica capaz de predecir las concentraciones de cloro en
cualquier punto de la red y para cada uno de los intervalos de simulación, dadas ciertas
concentraciones en las fuentes. El autor encontró que los cambios en la concentración del cloro son
resultado de la convección y la reacción química y bioquímica del cloro con el agua, las paredes del
tubo y los microorganismos.
Tzatchkov & Yamanaka (2004) en un nuevo estudio, explican el comportamiento del
decaimiento del cloro residual libre de la siguiente manera: 1. El decaimiento es proporcional al
contenido de materia orgánica en el agua. 2. El agua en cualquier punto de una tubería con flujo
continuo es constantemente reemplazada por agua proveniente de las fuentes que lleva cierto
residual libre de cloro. 3. El cloro residual libre en la muestra se consume, oxidando la materia
orgánica, hierro, manganeso y material nitrogenado en el agua. 4. La materia orgánica contenida en
el agua tiene ciertos componentes que reaccionan rápidamente con el cloro y otros componentes que
reaccionan lentamente.
Teniendo en cuenta los estudios anteriores, un análisis basado en la concentración mínima
de cloro residual dentro del sistema debe tener en cuenta el decaimiento con el tiempo y la distancia
desde la fuente. Tanto el K
w,
como el K
b
no se conocen en detalle debido a que en una RDAP
normalmente hay interacción de aguas, así que la forma en cómo ésta decae es propia de cada
tubería; el primer coeficiente depende del material de la pared interna y es constante, mientras que
el segundo puede variar debido a que la cantidad de agua proveniente de cada fuente puede ser
diferente en cada tubería. Además, el posible desprendimiento de biopelículas también afecta el
coeficiente de cuerpo de cada tubería en forma diferente. Por lo tanto, el desconocimiento de K
b
y
K
w
, particularmente en redes grandes, dificultaría la localización óptima de PMC.
LOCALIZACIÓN DE PMC PARA DETECTAR EVENTOS DE CONTAMINACIÓN
A lo largo de los años ha surgido una preocupación mundial acerca de la posibilidad de que las
RDAP se convirtieran en objetivo de ataques terroristas. Debido a esto, los esfuerzos se
encaminaron hacia la identificación de incidentes de contaminación de baja probabilidad pero con
un alto impacto, dando así el tiempo suficiente para una respuesta apropiada por parte de la EPS que
mitigue cualquier impacto adverso (Berry et al., 2005; Leskovec et al., 2006).
En el estudio presentado por Berry et al. (2005), los autores consideran un modelo de
programación de enteros con el cual encuentran la mejor solución siempre y cuando se realice una
serie de simplificaciones a fin de limitar el número de parámetros de diseño. Finalmente
encontraron que un aumento o disminución en la sensibilidad en la localización de PMC, obedece al
número de sensores que caen dentro de 1 de los 3 regímenes definidos en el estudio.
Debido a la complejidad de las RDAP, se han desarrollado diferentes herramientas
computacionales para facilitar dichos análisis. Como un ejemplo de esto, la U.S. Environmental
5
Protection Agency EPA, Sandia National Laboratories, Argonne National Laboratory y la
Universidad de Cincinnati (USEPA 2008) desarrollaron un software de acceso libre llamado
TEVA-SPOT (Evaluación de la vulnerabilidad ante un conjunto de amenazas y herramienta para la
optimización en la localización de sensores, por sus siglas en inglés) (Berry et al., 2008), para
definir el número de PMC necesarios en una RDAP, a fin de reducir el riesgo de incidentes de
contaminación bajo el lineamiento de una función objetivo (Murray et al., 2008). Los autores hacen
uso de EPANET (Rossman, 2000) para simular los eventos de contaminación, suponiendo una
inyección de contaminante biológico en un solo punto del sistema. Las características de dicho
contaminante fueron completamente hipotéticas, en donde la dosis a la cual el 50% de la población
es infectada es de (D
L50
= 100000) microorganismos, el periodo de incubación es de 7 días y la tasa
de mortalidad no tratada es del 30%; el contaminante se comporta como un trazador no
conservativo dentro de la RDAP. Por último, con el propósito de incorporar la incertidumbre en
cuanto al punto de inyección, el incidente fue simulado en cada uno de los nudos con demanda de
los usuarios. Finalmente, los resultados mostraron que el número de PMC depende de la reducción
en el riesgo objetivo que la EPS esté dispuesta a asumir, haciendo un análisis de riesgo versus costo.
CASO DE ESTUDIO, RED TIPO
A fin de encontrar la mejor aproximación hacia una metodología que optimice la localización de
sensores en RDAP, se analizaron 37 redes correspondientes a cada uno de los sectores hidráulicos
en los que se encuentra dividido el sistema de distribución de la ciudad de Bogotá, Colombia. Sin
embargo, para presentar los análisis realizados, se tomó solo una de estas redes a manera de ejemplo
para ser analizada en este documento (Sector 13). A continuación se explican 2 técnicas:
metodología de calidad mínima, y metodología para detectar eventos de contaminación intencional
o accidental TEVA-SPOT (Berry et al., 2008).
Descripción de la red
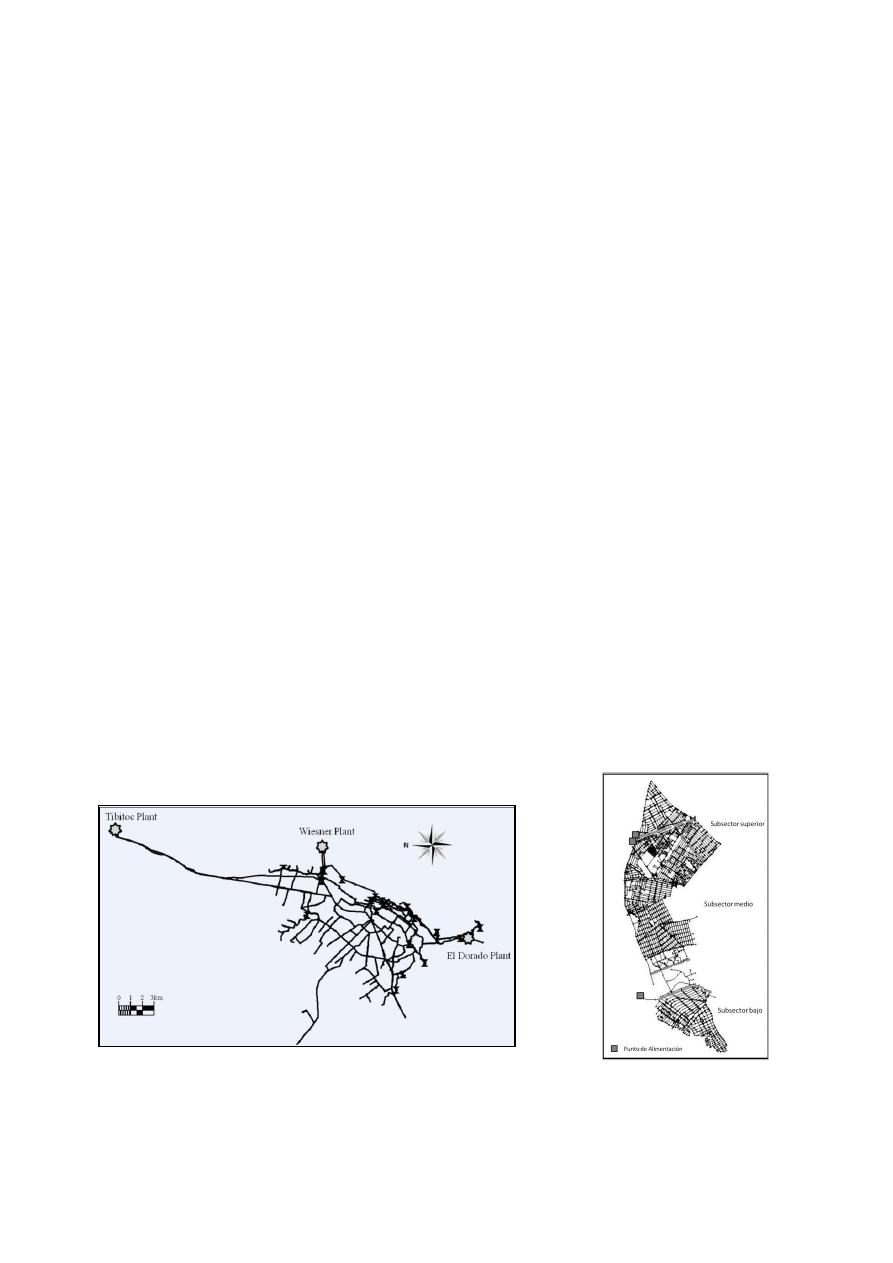
El Sector 13 de Bogotá (Figura 1) bajo estudio cuenta con 7616 tuberías, 6692 nudos y 3 fuentes de
alimentación; a su vez fue necesario subdividir esta red para algunos de los análisis, como se
explicará más adelante, generando así 3 subsectores hidráulicos, denominados alto medio y bajo, en
donde el subsector alto presenta 1021 tuberías, 900 nudos, 1 válvula y 1 embalse; el subsector
medio presenta 5125 tuberías, 4488 nudos, 6 válvulas y 1 embalse, y por último el subsector bajo
presenta 1441 tuberías, 1287 nudos, 1 válvula y 1 embalse (Figura 2).
Figura 2.- Plano Sector 13, Bogotá.
Metodología, Calidad mínima
Como se estableció anteriormente, el decaimiento va a depender del coeficiente de cuerpo (K
b
) y del
coeficiente de pared (K
w
). Por otra parte, debido a que la RDAP de la ciudad de Bogotá no cuenta
Figura 1.- Plano de la red de acueducto (EAAB) de Bogotá.
6
con los valores de los coeficientes de K
b
y K
w
, se tuvo que realizar un análisis de sensibilidad,
tomando deferentes valores reportados en la literatura para generar distintos escenarios. Se
desarrolló una macro en lenguaje Visual Basic for Applications, en Microsoft Excel, que permite
identificar el cloro mínimo en cada uno de los nudos durante un período de tiempo determinado,
identificando así el 1% de los nudos que presentan los valores mínimos de cloro en cada uno de los
escenarios planteados. Luego se procede a realizar un análisis de frecuencias, para determinar los
nudos en donde más frecuentemente el cloro presenta la mínima concentración, siendo finalmente
dichos puntos los lugares indicados para la ubicación de los PMC. Los resultados de esta
metodología se encuentran sujetos a los valores de los coeficientes K
b
y K
w
por lo que sería ideal
conocer sus valores para la red que se desee trabajar, lo cual no siempre es viable.
Descripción del programa
Para hacer uso del programa de Calidad Mínima es necesario contar con la librería de funciones del
Toolkit (Epanet.dll) y el archivo (*.inp) referente a la RDAP que se desea estudiar. Adicionalmente,
antes de dar inicio al análisis de cloro mínimo, es necesario definir los siguientes parámetros: 1.
Número de escenarios, 2. Tiempo de inicio de cálculo de calidad (horas) y 3. Delta de cálculo de
calidad: 1 minuto, 30 segundos, 1 segundo.
Para la determinación de los escenarios de K
b
y K
w
se realizó una búsqueda exhaustiva en la
literatura. Así se establecieron 15 conjuntos de valores que logran representar apropiadamente el
comportamiento del decaimiento del cloro en las RDAP de cada sector de Bogotá; se incluyeron
escenarios extremos, para los cuales se realizaron varios análisis de sensibilidad. Como caso de
estudio se usa el Sector 13. Luego, se probaron distintos escenarios donde los valores de K
b
y K
w
fueran iguales hasta encontrar aquel cuyo resultado para el decaimiento de cloro fuera lo más
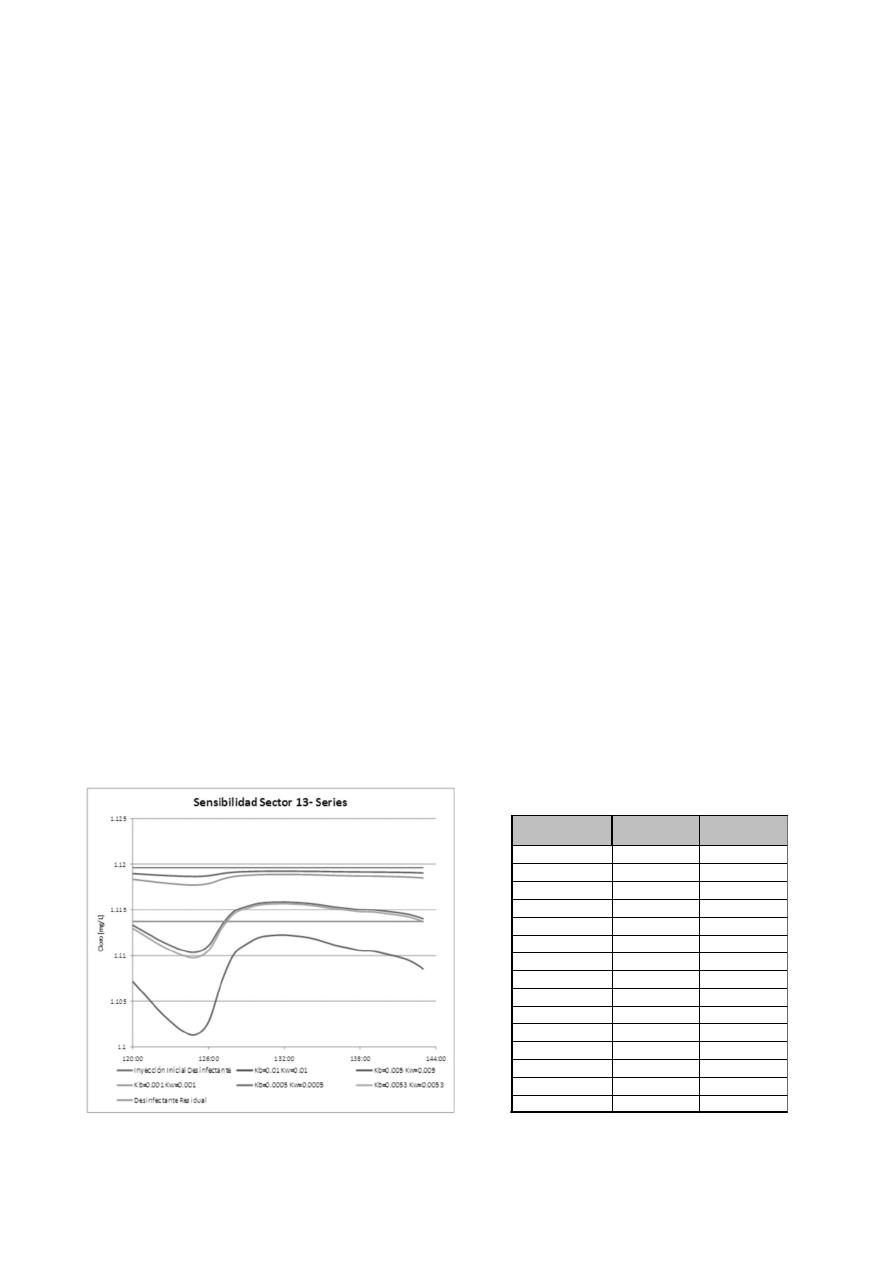
aproximado al valor medio obtenido para el PMC Venecia (Figura 3); así se obtuvieron los valores
de 0.0053 para K
b
y 0.0053 para K
w
(ambos adimensionales para este estudio), que comparado con
otros estudios son muy bajos (Vasconcelos et al., 1997; Cheung et al., 2009; Hallam et al., 2003).
El escenario planteado con valor de K
b
y K
w
de 0.0053 obtiene la serie de tiempo de desinfectante
residual más cercana al valor medio de cloro en el PMC Venecia según los datos históricos. Esto
permite tener un acercamiento aproximado a los valores reales de los coeficientes de decaimiento
que se presentan en las RDAP de Bogotá. Luego se realizó la determinación de los escenarios de K
b
y K
w
, donde se obtuvo la relación entre los dos coeficientes, buscando escenarios análogos cuyos
resultados de decaimiento de cloro fueran aproximadamente iguales. Por último, se llevó a cabo la
selección de escenarios manteniendo la proporcionalidad entre K
b
y el K
w
(Tabla 1).
Figura 3.-Sensibilidad Sector 13, comparación
series de tiempo.
Tabla 1.- Escenarios de K
b
y K
w
probados durante
el desarrollo de la metodología de Calidad Mínima.
Escenario
K
b
[d
-1
]
K
w
[m*d
-1
]
1
0
-0.01
2
0
-0.1
3
0
-1
4
0
-3
5
0
-5
6
-0.1
0
7
-1
0
8
-3
0
9
-5
0
10
-10
0
11
-5
-0.5
12
-1
-0.5
13
-3
-0.5
14
-3
-0.2
15
-3
-1

7
El segundo parámetro, referente al tiempo de inicio del cálculo de calidad, hace mención a la
modelación de la calidad del agua en RDAP a lo largo de intervalos de tiempo específicos. Para el
caso del análisis de cloro residual, se debe fijar una inyección inicial que parte desde los puntos de
alimentación del sistema (plantas) hacia los nudos. Analizando el comportamiento de varios
modelos hidráulicos se estableció 120 horas como el tiempo inicial para el cálculo de calidad,
instante en el cual ya se ha estabilizado el desinfectante a lo largo del sistema.
Finalmente, el tercer parámetro de entrada hace alusión al delta de tiempo (∆t) de cálculo
para la determinación de cloro residual en los nudos. Para el caso específico de la red en estudio, se
observó que para algunos escenarios se obtuvo una diferencia hasta del 42% entre los resultados
reportados para ∆t de 1 minuto y los resultados para un ∆t, previamente elegido, de 1 segundo. Esto
se debe a las limitaciones computacionales propias de la modelación. Para el caso de este programa
se usó un ∆t de cálculo de calidad de 1 minuto, 30 segundos o 1 segundo. Una vez estos datos son
alimentados al programa, este lee el número de tuberías y de nudos de la red y asigna el cloro como
el parámetro químico a ser modelado, fijando una concentración de 1 mg/L de cloro a los embalses
y 0 mg/L de cloro al resto de los nudos. Después de esto, el programa inicia la construcción de las
estructuras de datos para los tubos, nudos y cloro mínimo en vectores; en este punto se definen los
parámetros para el ciclo de análisis de cloro, en donde se establece el número de escenarios (m) y
los coeficientes K
b
y K
w
, correspondientes a cada escenario. Para el primer escenario (m=1), el
proceso incluye un filtro, en donde después de haber asignado los K
b
y K
w
y haber calculado la
hidráulica en EPANET, el filtro toma aquellos nudos válidos y descarta los restantes, entendiendo
los primeros como aquellos en donde la v ≥ 0,005 m/s en el tubo de alimentación; de esta manera,
nudos con velocidades inferiores a este valor fueron descartados suponiendo que no presentaban
demanda.
Una vez el programa de Calidad Mínima ha filtrado los nudos en el primer escenario y ha
resuelto la hidráulica para el total de los 15 escenarios (Tabla 1), procede a resolver la calidad a fin
de establecer los nudos que más frecuentemente presentan los valores mínimos de cloro. Para el
análisis de frecuencias se escogió como criterio tomar el 1% de los nudos con los valores más
críticos de cloro mínimo presentes en la red; adicionalmente, se decidió fijar unos límites en dicho
porcentaje, definiendo así que para ningún caso este 1% sea menor a 10 o superior a 100 nudos.
Una vez se han identificado el 1% de nudos con el valor mínimo de cloro para cada uno de los 15
escenarios, se empieza a ejecutar la función para calcular frecuencias de nudos críticos. En este
análisis se incluyen únicamente aquellos encontrados dentro del 1% de los nudos con valores
críticos de cloro mínimo, en donde se asigna un valor de 1 al escenario cuando el nodo se encuentre
dentro del rango del 1% con cloro más bajo y un valor de 0 al escenario donde no se encuentre
dentro de este rango; de esta manera, si un nodo se encuentra dentro del rango del 1% para todos los
escenarios, presentará una sumatoria de 15, o si por el contrario se encuentra dentro del rango del
1% para un solo escenario, dicho nodo presentará una sumatoria de 1, variando así los valores de la
sumatoria de frecuencias entre 1 y 15.
Localización de PMC en la red del Sector 13
El análisis de frecuencias de nudos críticos permite establecer qué tan repetitiva es la presencia de
los nudos con cloro mínimo en la red. En la Figura 4 se presenta el análisis de frecuencias, dividido
en 5 intervalos de frecuencia para la red bajo estudio. Se observan los nudos con frecuencias de
cloro mínimo entre 1 y 3, entre 4 y 6, entre 7 y 9, entre 10 y 12 y frecuencias entre 13 y 15. Se
observó en general una tendencia a localizar los puntos críticos hacia los nudos más alejados de la
fuente abastecedora, entendiendo esto como aquellos nudos en los cuales la trayectoria del flujo
debe ser mayor sin importar que la distancia topológica sea relativamente corta. Adicionalmente
cabe resaltar que aun cuando se tiene el filtro de velocidades se debe tener especial cuidado con las
tuberías que se encuentran cerradas o que por algún motivo particular, el flujo no llegue a ellas.
Para el caso específico de la red del Sector 13, se observa que la mayoría de los nudos con valores
mínimos de cloro, con una frecuencia entre 13 y 15, se encuentran ubicados en la parte inferior del
sector. Si bien el programa arroja los puntos de cloro mínimo representativos del sistema no quiere
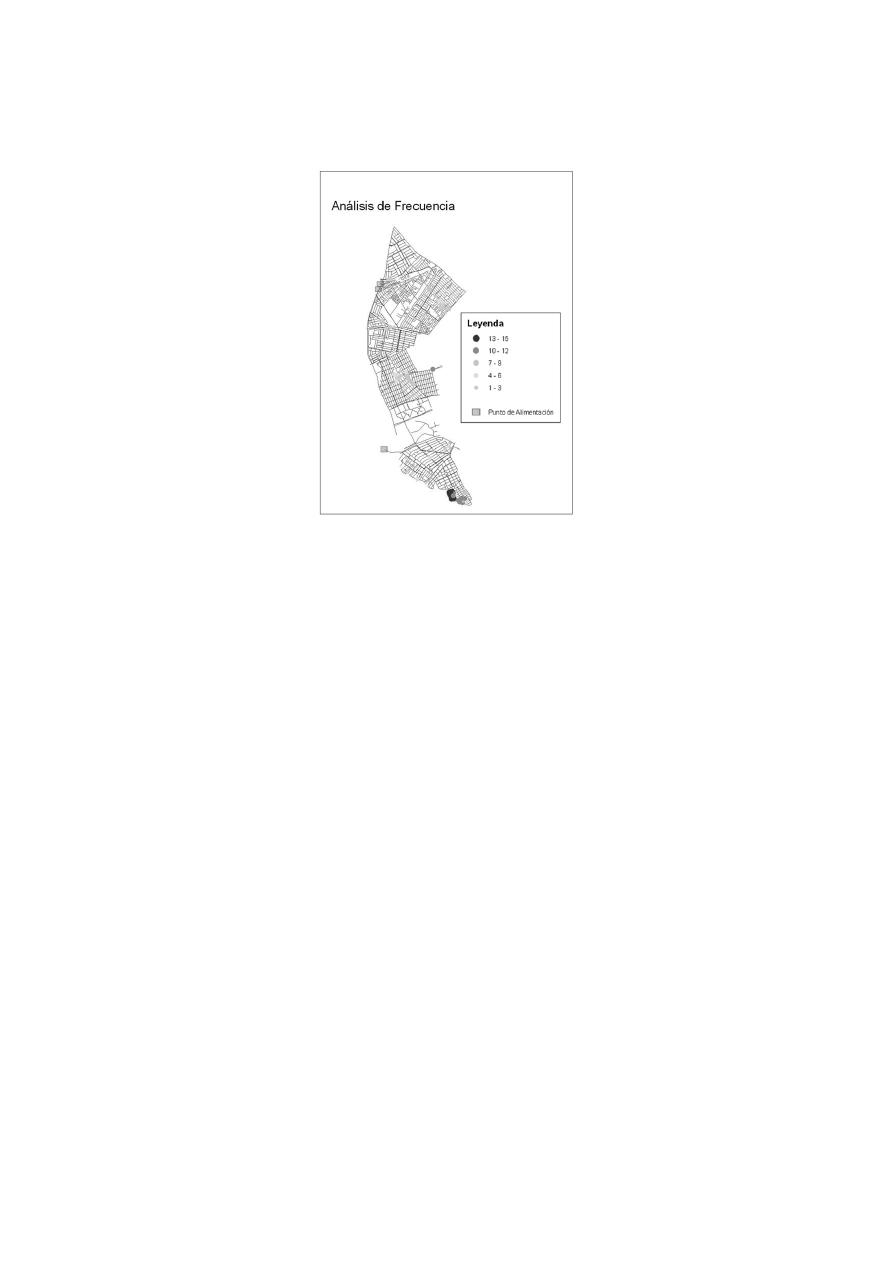
8
decir que en todos esos puntos deba ubicarse un PMC; sin embargo, permite tener una noción de la
zona específica donde se debe ubicar el PMC ya que éste sería representativo de los nudos a su
alrededor. Por lo tanto sería prudente ubicar solo un PMC en esa área para que represente el
comportamiento general de los nudos a su alrededor.
Figura 4. -Análisis de frecuencia de cloro mínimo, metodología Calidad Mínima.
Metodología para detectar eventos de contaminación , TEVA-SPOT
La forma mediante la cual puede evaluarse la gravedad de cierto ataque o desprendimiento de
biopelículas sobre una RDAP, está relacionada con la afectación que el ataque cause sobre algún
aspecto particular del sistema. El software TEVA-SPOT (Berry et al., 2008) permite realizar los
cálculos y los análisis con base en los resultados de los siguientes parámetros: 1. Tiempo de
detección en minutos desde el comienzo hasta la detección por el primer sensor; 2. Extensión del
contaminante en la red, tomado como la longitud total de tuberías contaminadas en el tiempo de
respuesta; 3. Masa consumida en los nudos con demanda; 4. Volumen de agua contaminada
consumida; 5. Número de incidentes no detectados por ningún sensor antes de que la simulación
termine; 6. Número de individuos expuestos al contaminante; 7. Número de individuos que reciben
una dosis de contaminante por encima de cierto umbral y 8. Número de individuos muertos (Berry
et al., 2008).
Descripción del programa
Como primer paso para la realización del diseño de la red de PMC, se necesita establecer cuáles son
los posibles escenarios contra los que se desea la protección. Para lograr este objetivo, TEVA-SPOT
(Berry et al., 2008) requiere del modelo hidráulico y de un archivo plano separado por tabulaciones
en el que se definen los posibles escenarios de contaminación contra los que se desea diseñar el
sistema de protección. Una vez se definen las posibles formas de ataque al sistema, el segundo paso
es calcular el impacto que cada una de éstas presentó sobre la masa consumida, el tiempo de
detección, la extensión de la pluma, el volumen de agua contaminada y los incidentes no detectados
para los distintos escenarios planteados. Con los diferentes tipos de impactos calculados, el
siguiente paso consiste en determinar un cierto número de PMC, de forma que se minimice el efecto
de los eventos. Así mismo, debe indicarse al programa, por lo menos, el número de PMC que desea
ubicarse y el tipo de algoritmo de optimización que se desee seguir.
Finalmente, una vez se tienen las soluciones parciales de los puntos, el cuarto paso consiste
en realizar un proceso iterativo, a través del cual se estudie el desempeño de dichas soluciones con
respecto a las demás restricciones que desean cumplirse, para obtener así la que mejor satisfaga
todas las expectativas. Adicionalmente, TEVA-SPOT permite evaluar el efecto producido por
9
impactos no necesariamente referentes a eventos de contaminación intencional o accidental, como
lo son los efectos debidos a eventos de turbiedad (ej. Desprendimiento de biopelículas); para lograr
esto, los mejores indicadores son aquellos que permiten determinar un umbral máximo. Dentro de
estos encontró como recomendable el indicador masa consumida en los nudos.
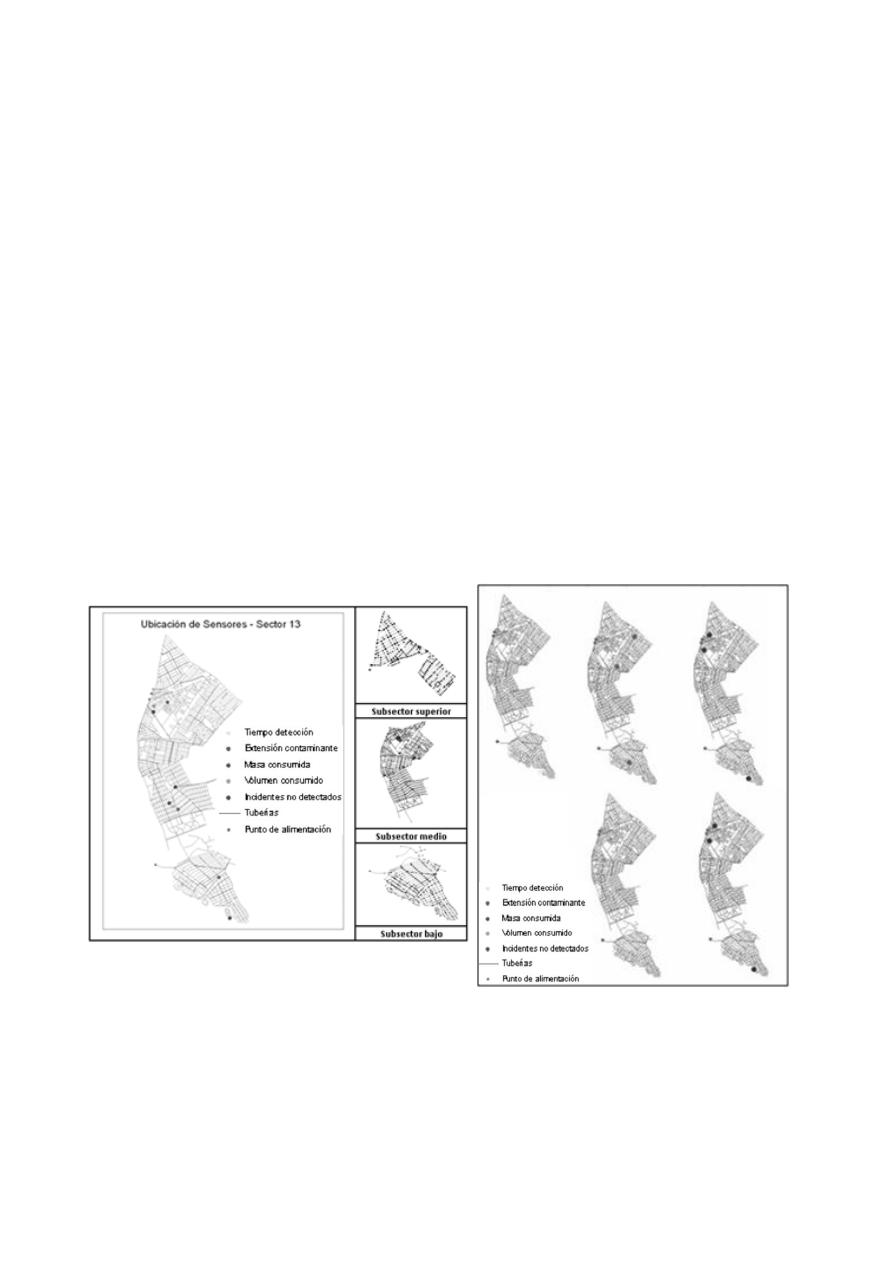
Localización de sensores en la red del Sector 13
El Sector 13 cuenta con tres puntos de alimentación que subdividen el sector en tres subsectores
hidráulicos. Al analizar esta red se encontró, que al momento de realizar la ubicación de tres
sensores para cada uno de los indicadores, ninguno de estos fue ubicado dentro del subsector
hidráulico superior (Figura 2), el cual se alimenta de una fuente independiente. De esta manera, a
fin de incluir puntos de monitoreo en cada una de las zonas que contaban con puntos de
alimentación diferentes, se decidió realizar los análisis dividiendo la red en los tres subsectores ya
mencionados (Figura 5). El primer análisis consistió en determinar la sensibilidad de los puntos
localizados al variar la cantidad de masa inyectada en los nudos que tenían demanda. Este análisis
mostró que una variación en la masa inyectada en los nudos implica cambios significativos en el
indicador de masa consumida; así por ejemplo, al inyectar 50 mg/L, el impacto promedio
aproximadamente es del 50% menor con respecto a cuándo se inyecta 100 mg/L. Así mismo, al
inyectar 200 mg/L el impacto promedio de masa consumida en los nudos es el doble con respecto al
escenario en el que se inyectan 100 mg/L; en contraste, los demás indicadores no se ven afectados
por una variación en la masa inyectada. En la Figura 6 se observan los resultados obtenidos al
ubicar un sensor en cada una de las divisiones de la red tipo. Los sensores para minimizar el tiempo
de detección, la masa consumida en los nudos y los incidentes no detectados son exactamente los
mismos, mientras que por el contrario, los sensores localizados a fin de minimizar la extensión del
contaminante a través de las tuberías fueron localizados en puntos diferentes.
Al comparar el impacto promedio de localizar los PMC, tomando en cuenta tanto la red completa
como subdividiéndola, se observó que el impacto promedio se redujo en todos los indicadores en
este último caso. Es de notar que aunque el impacto promedio disminuyó notablemente para el
subsector superior e inferior, para el subsector medio el impacto promedio aumentó
considerablemente; esto se debe a que este último presenta mayor número de nudos y tuberías que
Figura 6.- Localización de sensores, con 5
diferentes criterios de localización, en cada
subsector de la red tipo, TEVA’SPOT.
.
Figura 5.- Ubicación de sensores, TEVA-SPOT,
Sector 13.

10
los otros dos subsectores, por lo que al tomar la red como una sola TEVA-SPOT (Berry et al.,
2008) da prioridad a la ubicación de sensores en la zona media. Por esta razón se recomienda que,
en casos en los que el número de sensores sea limitado, se realice un análisis de ubicación de
sensores por subsectores si la RDAP objeto del diseño de red de PMC así lo permite. En otro de los
análisis realizados se buscó variar el tiempo de simulación, comparando un tiempo de simulación de
144 horas (6 días) con respecto a un tiempo de simulación de 96 horas (4 días). Se encontró que la
ubicación de PMC no cambiaba en ninguno de los casos. Así mismo, pudo observarse que los
indicadores de extensión de contaminante, masa consumida e incidentes no detectados, no
cambiaban de manera significativa con el tiempo de la simulación. Contrario a esto, los indicadores
de tiempo de detección y volumen consumido en los nudos, aumentaron de manera directa con el
tiempo de duración de la misma. El aumento significativo que se muestra en estos últimos dos
indicadores, se explica debido a que TEVA-SPOT (Berry et al., 2008) asigna como tiempo de
detección de un incidente no detectado el tiempo de duración de la simulación. Por esta razón, se
asigna un alto porcentaje de incidentes no detectados para un tiempo de simulación mayor (144
horas), que a su vez generará un mayor volumen de agua consumida, ya que este depende de los
incidentes no detectados desde el comienzo de la simulación hasta el final.
CONCLUSIONES
Teniendo en cuenta todos los análisis realizados, la conclusión más importante es que los valores de
K
b
y K
w
no tienen influencia significativa en la localización de PMC en RDAP.
Se determinó que el número de PMC requeridos no se incrementa linealmente con la
densidad poblacional; esto implica que en la modelación hidráulica se puede hacer uso de modelos
esqueletizados. Sin embargo, las diferentes formas de operación hidráulica no afectan la
metodología.
Las dos metodologías implementadas implican la existencia de un modelo hidráulico
calibrado de la red. Por consiguiente, las EPS deben dar este paso antes de escoger en forma precisa
sus PMC.
El programa de Calidad Mínima permite, a partir de un modelo hidráulico calibrado, obtener
los puntos críticos que presentan mayor decaimiento de cloro para distintos escenarios de
coeficientes de decaimiento. De forma general, el programa permite localizar los nudos de una red
de abastecimiento de agua potable en los cuales el cloro residual es mínimo.
En cuanto al diseño de redes de PMC de alerta temprana, TEVA-SPOT (Berry et al., 2008)
se presenta como una herramienta confiable que permite de manera rápida y fácil, determinar la
ubicación de los PMC.
Según los análisis realizados haciendo uso de TEVA-SPOT (Berry et al., 2008), se obtuvo
que la localización óptima de PMC que minimicen el tiempo de detección, la masa consumida y el
número de incidentes no detectados, comparten varios puntos de localización en común. Por el
contrario, al realizarse la evaluación de los diferentes indicadores a fin de minimizar la extensión de
tuberías contaminadas, se puede observar un aumento significativo en el impacto promedio de cada
indicador.
Finalmente, como se ha mencionado a lo largo de este documento, las diferentes
configuraciones de las redes de PMC obtenidas en este estudio, obedecen a un modo de operación
específico del sistema, el cual es determinado por los modelos hidráulicos. Un cambio en el modo
de operación implicaría un cambio en la hidráulica del sistema y por lo tanto la configuración de la
red de PMC cambiaría según las nuevas condiciones del flujo. Luego, es necesario que el diseño de
redes de estos se entienda como algo dinámico que obedece a condiciones hidráulicas de un
momento en particular y que la red debe ser diseñada tantas veces como modos de operación se
tengan en el sistema. Esto por supuesto implica costos muy altos, así que lo recomendable es tratar
de mantener las condiciones hidráulicas similares en el tiempo, evitando los cambios de operación
en la red.

11
REFERENCIAS
Aral, M., Guan, J. & Maslia, M. (2010). Optimal Design of sensor placement in water
distribution networks. . Journal of water resources planning and management.Vol. 136 (1): 5-18.
Leskovec, J. et al. (2006). Optimizing sensor placements in water distribution systems using
submodular function maximization. . Annual Water Distribution Systems Analysis Symposium.
Cincinnati, Ohio, USA.
Berry, J., E. Boman, et al. (2008). User’s Manual, TEVA-SPOT Toolkit 2.2, Sandia National
Laboratories, Albuquerque, NM.
Berry, J. W., L. Fleischer, et al. (2005). Sensor placement in municipal water networks. Journal of
Water Resources Planning and Management.Vol. 131(3): 237-243.
Clark, R.M. & Coyle, J.A. (1990). Measuring and modeling variations in distribution system
water quality. American Water Works Association. Vol.2, 46.
Koch, M.W. & McKenna, S.A. (2011). Distributed sensor fusion in water quality event
detection.Journal of water resources planning and management. Vol. 137 (1): 10-19.
Murray, R., Baranowski, T., et al. (2008). Risk reduction and sensor network design.Water
Distribution Systems Analysis, Kruger National Park, South Africa.
Ostfeld, A., J. G. Uber, et al. (2008). The Battle of the Water Sensor Networks (BWSN): A Design
Challenge for Engineers and Algorithms.Journal of water resources planing and management.
Rossman, L.A. (2000). Epanet 2 Users Manual. Cincinnati: EPA United States Environmental
Protection Agency.
Rossman, L.A., Clark, R.M. & Grayman, W.M. (1994). Modeling Chlorine Residuals in
Drinking Water Distribution Systems. Journal of Environmental Engineering, ASCE. Vol. 1210
(4), 803.
Shen, H. &McBean, E. (2011). Pareto optimality for sensor placements in a water distribution
system.Journal of water resources planning and management.Vol. 137 (3): 243-248
Tzatchkov, V. G. (1996). Modelo numérico del decaimiento del cloro en redes de agua potable con
flujo no permanente.Ingeniería hidráulica en México. Vol. XI(3): 53-60.
Tzatchkov, V. G. and V. H. Alcocer Yamanaka (2004). Decaimiento del cloro por reacción con
el agua en redes de distribución. Ingeniería hidráulica en México. Vol. XIX(1): 41-51.
Xu, J., P. S. Fischbeck, et al. (2008). Identifying Sets of Key Nodes for Placing Sensorsin
Dynamic Water Distribution Networks.Journal of water resources planing and management.
Xu, J., M. J. VanBriesen, et al. (2009). Decision making under information constraints. World
Environmental and Water Resources Congress. ASCE. Kansas City, Missouri, USA.
